

Sicherheit ist eine der größten Herausforderungen beim Bau von Autonomen Mobilen Robotern (AMRs). In diesem Artikel erörtern wir, was Navigationssicherheit im Kontext der mobilen Robotik bedeutet und wie man sie mit sogenannten dynamischen Sicherheitszonen gewährleisten kann.
Von der Lagerlogistik bis zu Produktionsprozessen sind autonome mobile Roboter (AMR) in allen Branchen auf dem Vormarsch. AMRs unterscheiden sich von den traditionelleren Automated Guided Vehicles (AGVs). Während AGVs präzise auf vordefinierten Routen "geführt" werden, sind AMRs durch verbesserte Sensortechnologien und Navigationsalgorithmen in der Lage, sich frei zu bewegen und ihren Weg zu wählen.
Roboter in die Lage zu versetzen, sich autonom durch eine komplexe und dynamische Umgebung zu bewegen, ist keine triviale Aufgabe. Eine zentrale Komponente ist dabei die Sicherheit der Navigation. Diese Industrien stellen oft schnelllebige Umgebungen mit gefährlichen Maschinen dar. Obwohl die Verbesserung des Durchsatzes und der Betriebszeit die Rentabilität vorantreibt, ist die Möglichkeit, Menschen aus gefährlichen Umgebungen zu entfernen und sie durch Roboter zu ersetzen, eine äußerst verlockende Aussicht. Dennoch müssen die Roboter in dieser Umgebung sicher sein! In diesem Artikel gehen wir der Frage nach, was Navigationssicherheit eigentlich ist, ziehen eine Motivation aus Beispielszenarien und erkunden schließlich unsere Lösung für dieses Problem.
Was ist Navigationssicherheit?
Wenn Kinder laufen lernen, stoßen sie ständig mit Dingen zusammen. Der durchschnittliche Erwachsene kann Kollisionen größtenteils vermeiden. Es ist eine grundlegende Fähigkeit für jedes sich bewegende System, Kollisionen zu vermeiden, insbesondere wenn dieses System mit einer Nutzlast von 1 t durch einen Fabrikkorridor rast. Man könnte meinen, dass ein sich bewegendes System sicher ist, wenn es anhält, wenn sich ihm etwas nähert, vielleicht auf 10 m. Aber was ist, wenn es sich bei dem Objekt um ein Auto handelt, das über die Autobahn rast?
Sicherheit bedeutet nicht einfach: "Anhalten, wenn sich etwas nähert". Je schneller man auf der Autobahn fährt, desto größer muss der Abstand zwischen den Autos sein. Außerdem wird uns beigebracht, dass Lastwagen oder Fahrzeuge mit größerer Wucht länger zum Bremsen brauchen und daher einen längeren Bremsweg haben. Selbst bei gleicher Geschwindigkeit versucht man also, ihnen mehr Platz zu lassen. Die genaue Bedeutung von "nah" ist also nicht eindeutig, da sie sowohl davon abhängt, was Sie sind, als auch davon, was sich um Sie herum bewegt.
Sicherheit bedeutet nicht einfach: "Anhalten, wenn etwas in der Nähe ist".
Wenn man auf der Autobahn schnell fährt, braucht man einen guten Abstand zum vorausfahrenden Auto, aber da alle geradeaus fahren, kann das Auto auf der nächsten Spur sehr nah sein. Trotzdem ist das eine absolut sichere Anordnung. Die Richtung der Sicherheit ist also kein Kreis. Wenn das vorausfahrende Auto bremst und wir zu nahe dran sind, um rechtzeitig zu bremsen, sind wir verantwortlich, da wir einen unsicheren Abstand hatten. Wenn das Auto neben uns beschließt, auf unsere Spur zu fahren und einen Unfall zu verursachen, kann man uns nicht vorwerfen, unsicher zu sein. Wenn man über Kollisionen nachdenkt, könnte Sicherheit bedeuten, dass man in der Lage ist, Kollisionen zu vermeiden, wenn man innerhalb eines Szenarios vernünftige Erwartungen erfüllt.
Sicherheit könnte sein: "In der Lage sein, Kollisionen zu vermeiden, wenn vernünftige Erwartungen innerhalb eines Szenarios erfüllt werden".
Sicherheit im Kontext von AMRs
Bei AMRs steht die Sicherheit im Zusammenhang mit den dynamischen Eigenschaften des Roboters selbst. Damit ein AMR anhalten kann, bevor er gegen eine Wand prallt, muss er seine aktuelle Geschwindigkeit kennen, wissen, wie schnell er bremsen kann, und daraus und aus anderen Faktoren, wie dem Bremsweg, ableiten. Kinder, die ihre eigenen dynamischen Eigenschaften noch nicht kennen, neigen dazu, immer wieder gegen Dinge zu stoßen! Damit ist der Teil "Kollisionen vermeiden können" abgedeckt. Aber es geht hier nicht nur um Mathematik, sondern um ein komplexes, bewegliches System. Es muss robust sein.
Es gibt branchenübliche Produkte und Lösungen, die von Haus aus getestet und von unabhängiger Seite als sicherheitskritisch eingestuft werden. In der mobilen Robotik finden wir dies bei den Laserscannern von SICK. Diese Scanner bieten die Möglichkeit, die Bremsen des Systems zu betätigen, wenn sich Objekte nähern, oder mit anderen Worten, wenn das Sicherheitsfeld verletzt wird. Damit ist der erste Aspekt der Sicherheit schon sehr weit gediehen. Wenn wir wissen, wie schnell ein Roboter bremsen kann, können wir diese Sicherheitsfelder erstellen , um sicherzustellen, dass wir rechtzeitig bremsen können. Aber wie bereits erwähnt, gibt es noch den zweiten Teil. Der "...vorausgesetzt, dass vernünftige Erwartungen innerhalb eines Szenarios erfüllt werden". Manchmal befindet sich ein Auto auf der Autobahn, manchmal auf einem Parkplatz. Manchmal fährt ein AMR einen geraden Korridor entlang, manchmal kommt er um eine unübersichtliche Ecke. Ein und derselbe AMR fährt in verschiedenen Szenarien mit unterschiedlichen Geschwindigkeiten, was bedeutet, dass wir mehrere, unterschiedliche Sicherheitsfelder benötigen.
Warum die Sicherheit von AMRs so schwierig ist
Aus zwei Gründen:
1. Man kann nicht einfach sagen, dass sich die dynamische Sicherheitszone in Abhängigkeit von der aktuellen Geschwindigkeit des autonomen Roboters ändern sollte. Woher sollen wir wissen, ob es sicher ist, zu beschleunigen? Wenn der AMR schneller wird, vergrößert sich die Zone. Wenn sich nun aber bei der Erweiterung der Zone ein Hindernis innerhalb der erweiterten Zone befindet, ist es zu spät, rechtzeitig zu bremsen. Er hat sich selbst in eine unsichere Situation gebracht. Mit anderen Worten: Die Sicherheitszone sollte die möglichen Geschwindigkeiten bestimmen, nicht umgekehrt!
2. Man kann die Geschwindigkeiten nicht einfach auf der Sicherheitsebene beschränken. Das Navigationssystem plant einen Weg zum Ziel mit einer gegebenen Systembeschreibung, wie schnell es abbiegen kann, wie schnell es abbremsen kann, usw. Wenn die Sicherheitsebene beschließt, die Winkelgeschwindigkeit zu begrenzen, ohne dass der Planer davon weiß, könnte er nicht in der Lage sein, die beabsichtigte Kurve auszuführen und vom Weg abkommen, oder nicht scharf genug abbiegen, um unter einem Wagen anzudocken, oder schlimmer noch, denken, dass er vorbeifahren und einem entgegenkommenden Hindernis ausweichen kann. Die Sicherheitszone, das hier die Geschwindigkeit einschränkt, würde den Roboter ungewollt auf Kollisionskurs bringen.
Unsere Lösung: Dynamische Sicherheitszonen
Was wir also erreichen wollen, ist erstens ein AMR, der sicher navigieren kann. Außerdem wollen wir einen autonomen Roboter, der mit der in einem bestimmten Szenario maximal möglichen Geschwindigkeit fährt. Wenn wir immer mit der geringstmöglichen Geschwindigkeit fahren würden, wäre das zwar sicher, aber der Durchsatz in der Fabrik wäre gering. Er wäre nicht in der Lage, so viele Wagen in einer Schicht zu transportieren. Sie muss effizient sein!
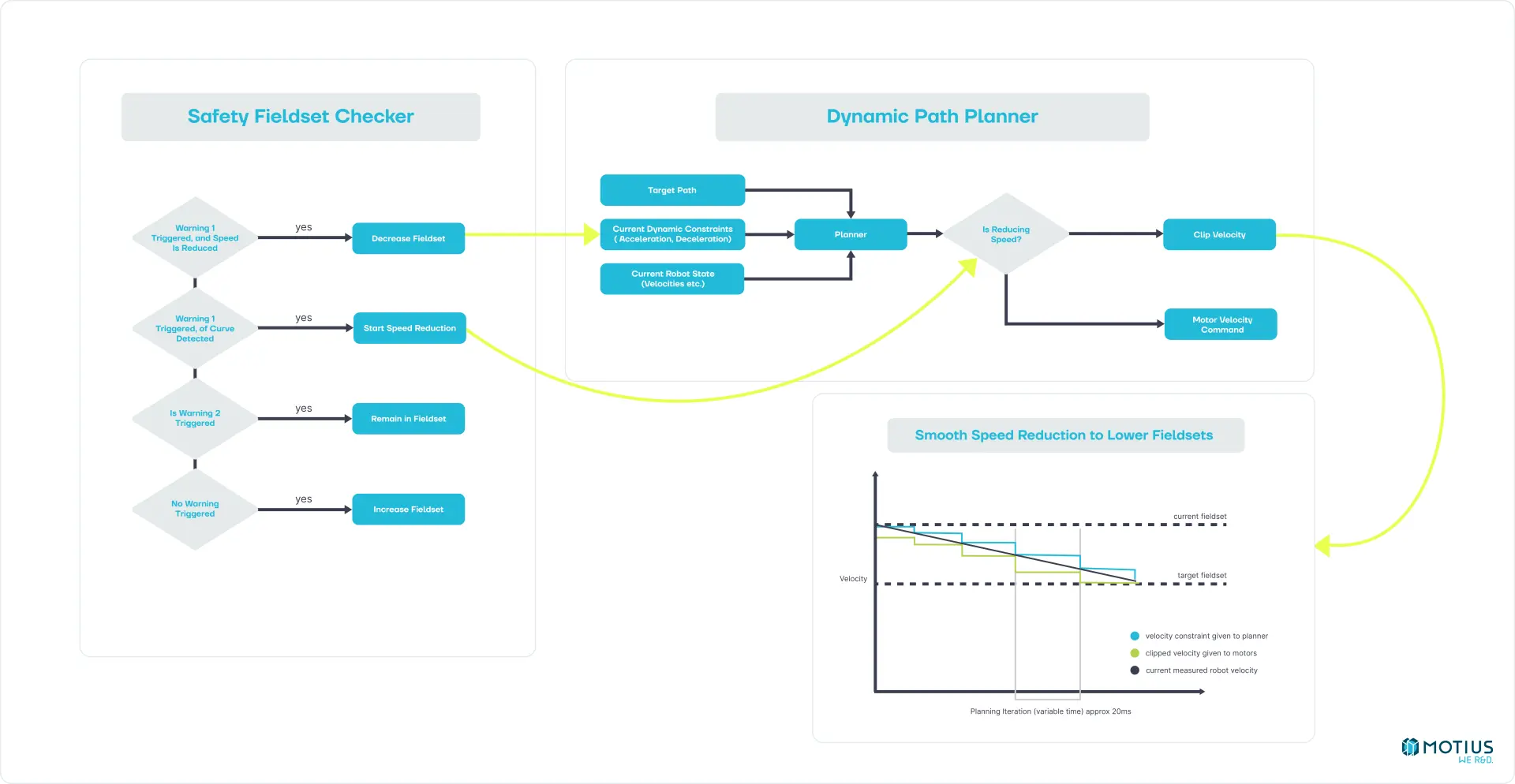
Der nachstehende Lösungsraum untersucht zunächst unsere Entscheidung für eine spezielle Sicherheitskomponente, die für das Umschalten zwischen den Sicherheitszonen verantwortlich ist (nicht, dass die aktuelle Geschwindigkeit einfach das Zonenset diktiert!). Dann betrachten wir den Planer und welche Informationen er benötigt, um einen Pfad zu planen, der sicherstellt, dass er gute Kenntnisse über das System hat , "dass er in der Lage ist, Kollisionen zu vermeiden" , und eine gute Vorstellung vom Szenario hat, "...vorausgesetzt, dass vernünftige Erwartungen innerhalb eines Szenarios erfüllt werden." Wir erklären dann das subtile Zusammenspiel zwischen den beiden Komponenten und fügen schließlich alles zusammen und zeigen einen Überblick über das gesamte System.
Wir wollten auch eine entkoppelte Architektur aufbauen. Mit anderen Worten: Sie sollte unabhängig vom Planer oder von der Sicherheitsschicht sein. Sollte sich die technische Lösung in einer der beiden Komponenten verbessern, sollten wir nicht das gesamte System überarbeiten müssen.
Sicherheitszonen Management
Es gibt mehrere Sicherheitssonensätze. Jedes Zonenset enthält drei Geometrien (Warnzone 2, Warnzone 1 und Schutzzone) sowie die entsprechenden dynamischen Beschränkungen. Einfach ausgedrückt: Je größer das Zonenset, desto schneller darf der AMR fahren. In engen Kurven halten wir den AMR langsam.
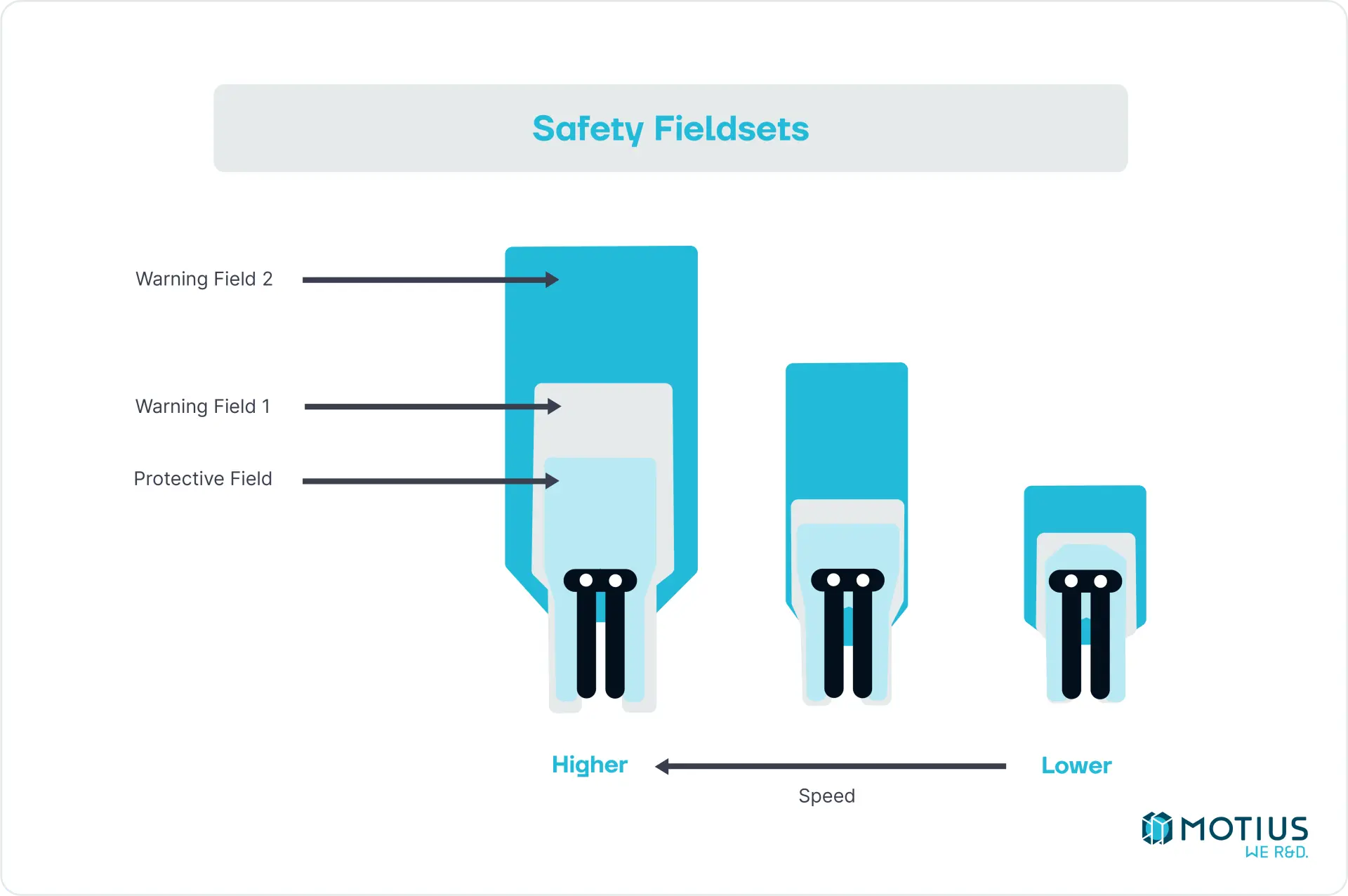
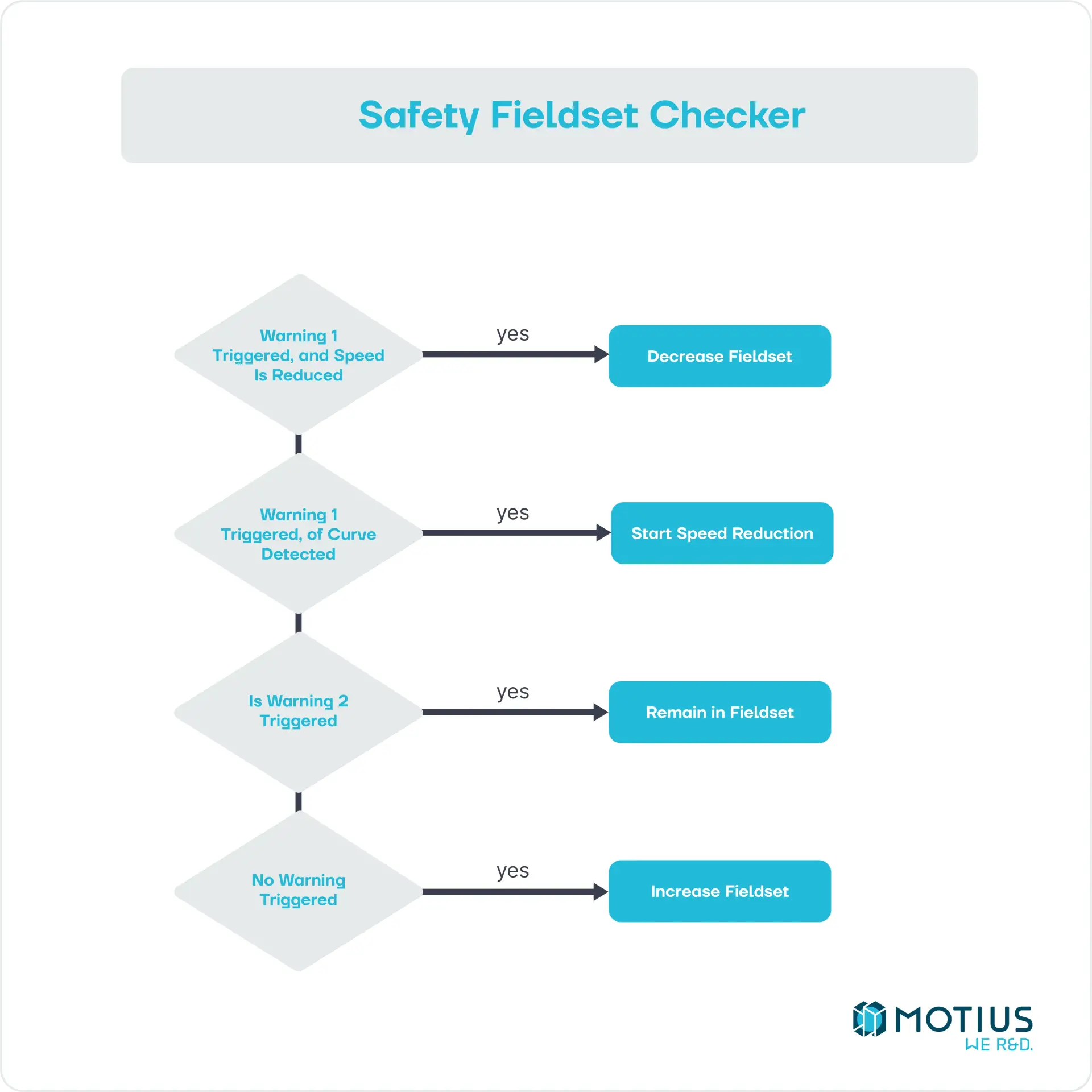
Zu jedem Zeitpunkt wird ein einzelner Zonensatz als aktiv betrachtet. Wir erhalten von den Laserscannern die Information , ob eines der drei Zonen des Zonensatzes gerade ausgelöst wird. Wenn die Schutzzone ausgelöst wird, werden die Bremsen sofort angezogen. Außerdem werden die dynamischen Beschränkungen des Zonensets beachtet. Bei der allgemeinen Navigation ist jedoch damit zu rechnen, dass bei Warnzone 1, Warnzone 2 oder gar keines ausgelöst wird.
Wenn Warnzone 1 ausgelöst wird, erlegen wir dem Roboter zusätzliche Geschwindigkeitsbegrenzungen auf und beginnen, die Geschwindigkeit zu verringern. Wenn wir die Zonengruppe sofort auf eine kleinere Zone reduzieren, könnte die Geschwindigkeit zu diesem Zeitpunkt die dynamischen Grenzen der unteren Zonengruppe überschreiten, was die Bremsen auslösen würde. Daher verringern wir die Geschwindigkeit langsam, bis wir uns innerhalb der akzeptierten Grenzen des unteren Zonensets befinden. Wenn Warnzone 2 ausgelöst wird, behalten wir die aktuelle Zonengruppe bei. Dies ist ein komfortables und sicheres Betriebsniveau! Wenn keine der Zonen ausgelöst wird, zeigt dies an, dass das Gebiet übersichtlicher ist, als wir es derzeit betreiben, und wir würden daher die Zonenmenge auf eine größere Zone erhöhen.
Einschränkungsbasierte Pfad Planung
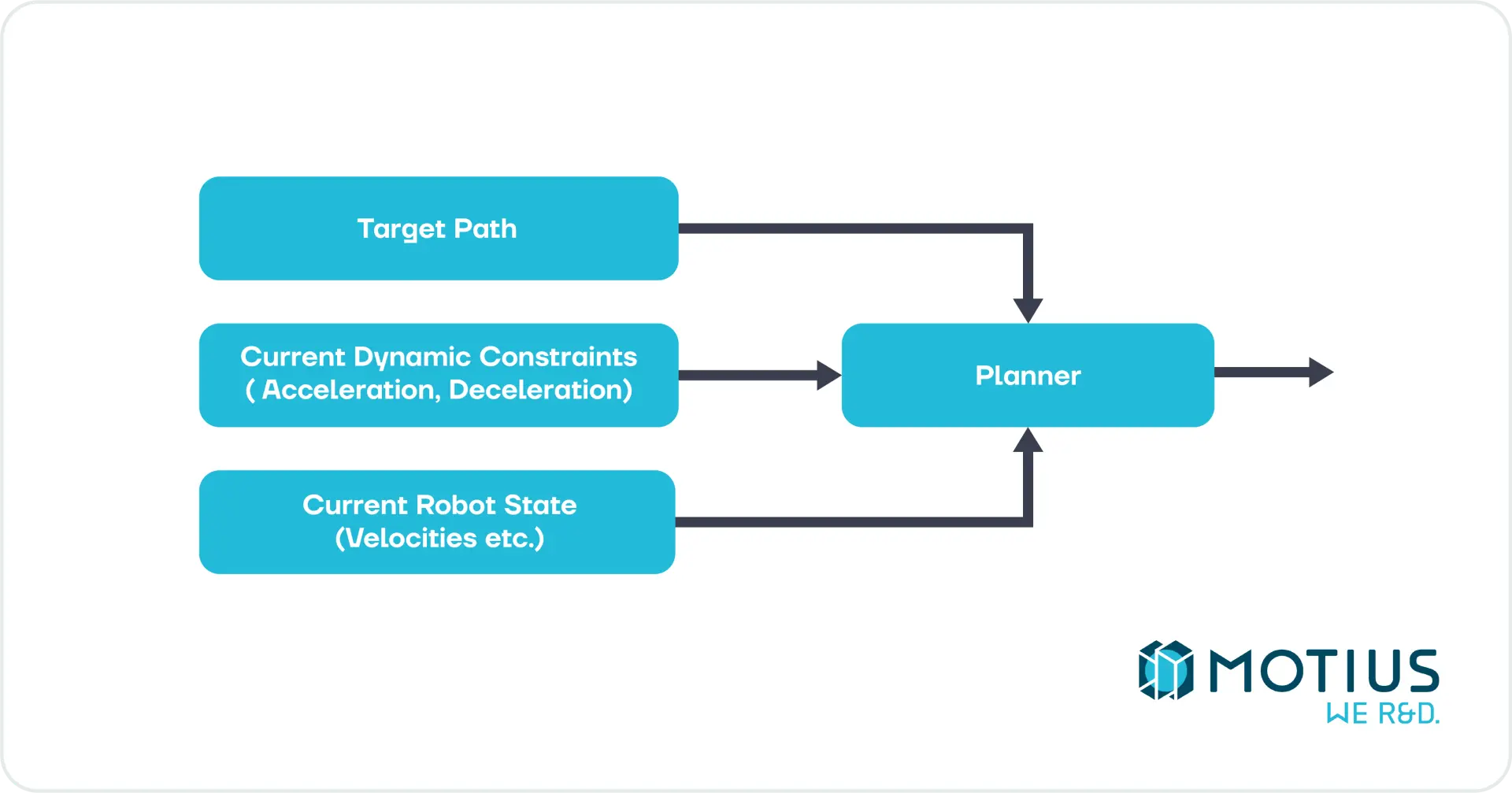
Der Planer ist dann dafür verantwortlich, einen allgemeinen Zielpfad zu nehmen und eine Flugbahn zu berechnen. Diese Bahn setzt sich aus Geschwindigkeitsbefehlen für jeden Motor zusammen. Der Planer ist "dynamisch" in dem Sinne, dass er als Eingabe die aktuellen dynamischen Sicherheitsbedingungen und den aktuellen Roboterzustand erhält. Dadurch wird sichergestellt, dass die geplante autonome Robotertrajektorie beides ist:
- Realistisch und möglich für den aktuellen Roboter auszuführen
- Passt in die Sicherheitsgrenzen und gerät nicht in Gefahr
Herunterschalten
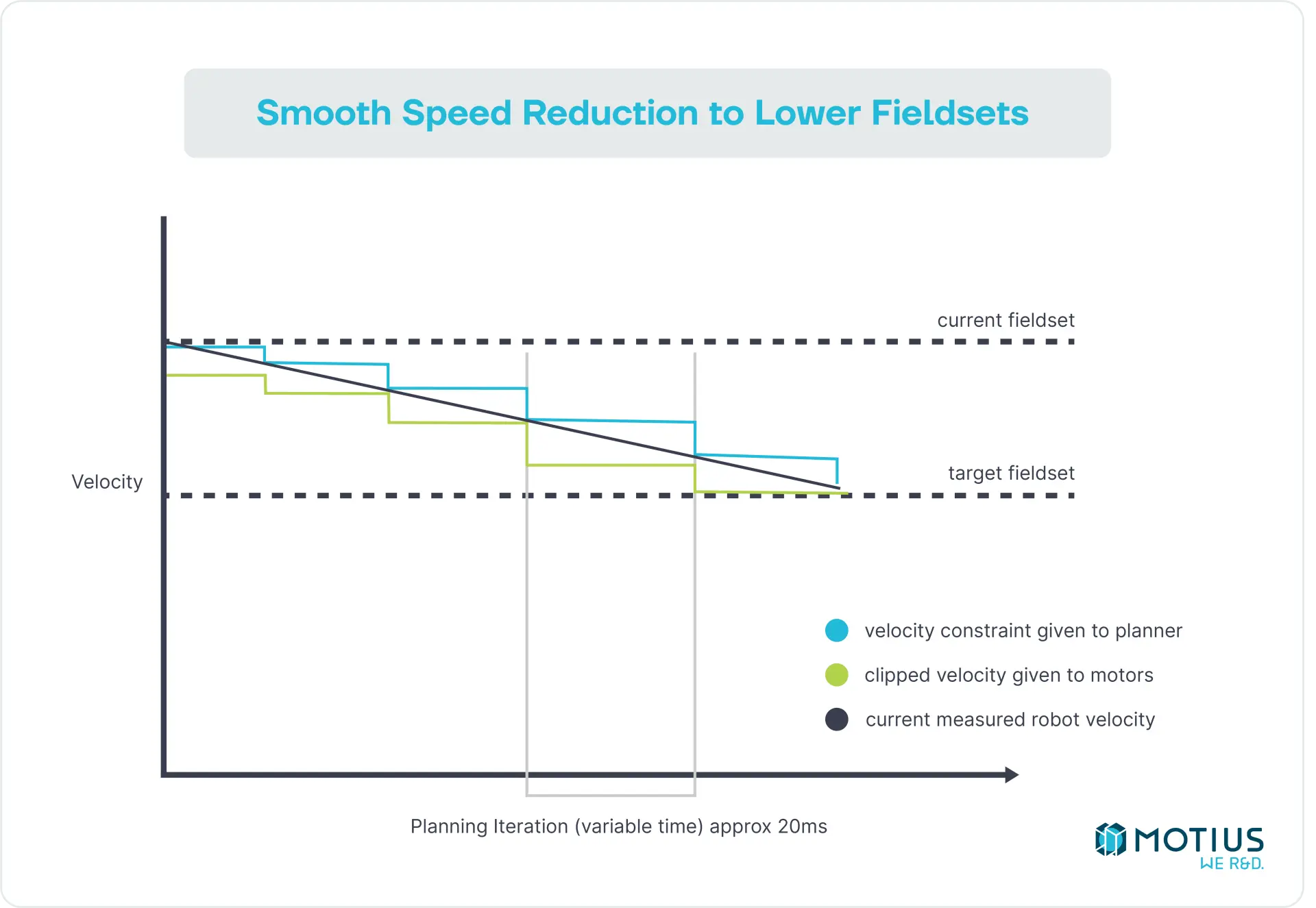
Wenn der Sicherheitsprüfer anzeigt, dass die Warnzone 1 ausgelöst wurde, sollte der AMR langsamer werden und in eine niedrigeres Sicherheitszone wechseln. Wie dies geschieht, ist unglaublich raffiniert. Der Planer hat immer noch die Beschleunigungs- und Verzögerungsbeschränkungen des aktuellen Sicherheitszonensatzes. Die Geschwindigkeitsreduzierung erfolgt durch schrittweises Abschneiden der Geschwindigkeitsbefehle, bevor sie die Motoren erreichen.
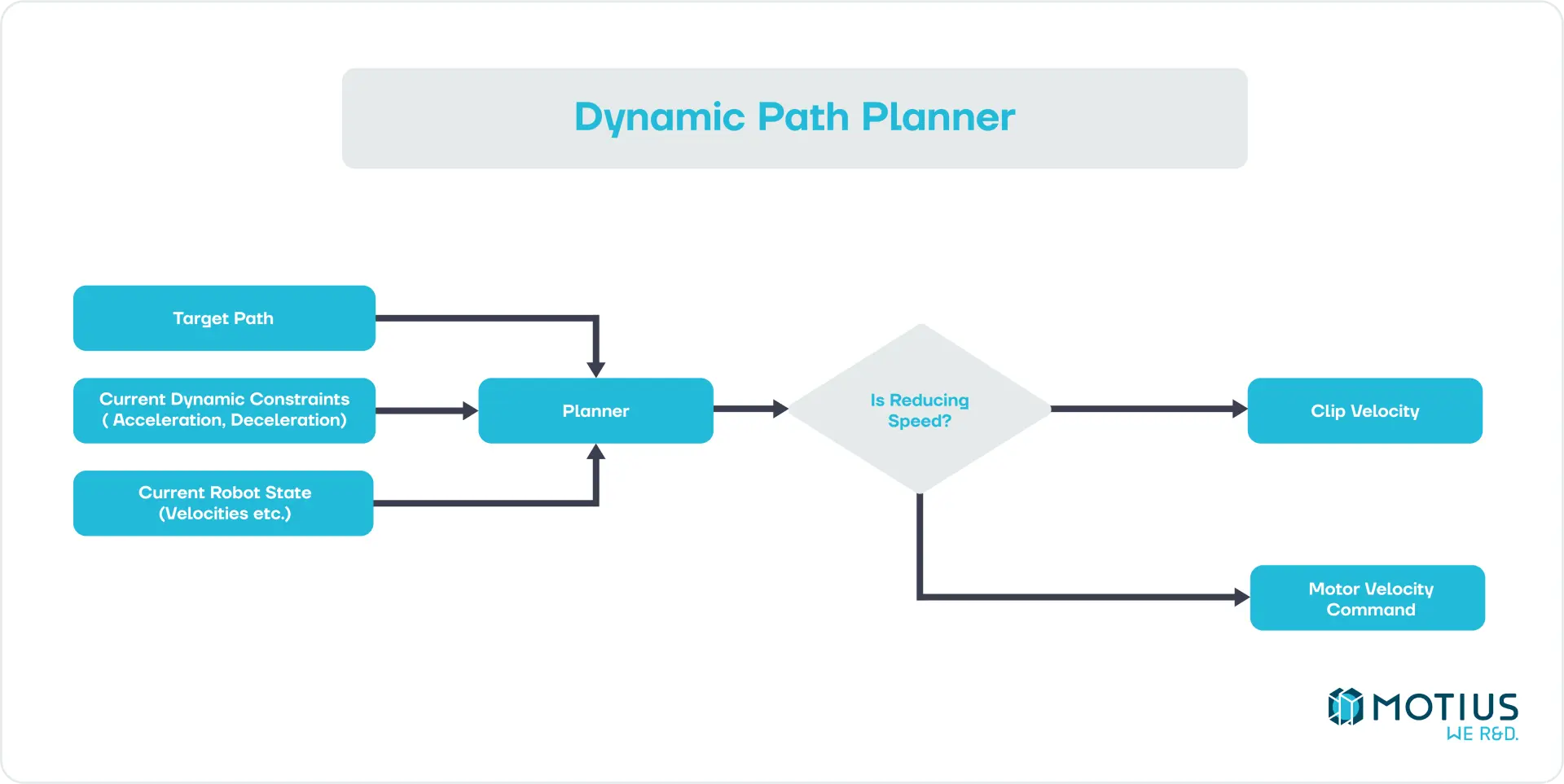
Die Geschwindigkeitsgrenze wird langsam reduziert, um der aktuell gemessenen Geschwindigkeit zu entsprechen. Durch die langsame und schrittweise Verringerung der aktuellen Geschwindigkeitsvorgabe für den Planer und die Beibehaltung der Beschleunigungs- und Abbremsvorgaben wird eine gleichmäßige und kontrollierte Abbremsung gewährleistet. Dies bedeutet auch, dass jede Planungsiteration nur geringe Unterschiede aufweist und somit die kontinuierlichen Planungsiterationen einen geringen Rechenaufwand erfordern. Sobald die Geschwindigkeit niedrig genug ist, um den unteren Zonensatz zu erfüllen, wird der derzeit aktive Zonensatz auf den unteren Zonensatz reduziert.
Alles zusammenfügen
Wir sehen schließlich, dass der dynamische Planer Eingaben von der Sicherheitsebene erhält. Zunächst erhält er den aktuellen Sicherheitszonensatz, so dass der Planer sicherstellen kann, dass sein Pfad mit den Sicherheitsbedingungen übereinstimmt. Er wird auch darüber informiert, ob er die Geschwindigkeit beschneiden sollte, bevor er sie an die Motoren weitergibt.
Sichere AMRs bauen
Die Sicherheit der Navigation ist ein tschwieriges Terrain. Dynamische Sicherheitszonen sind ein wesentliches Instrument zur Gewährleistung einer sicheren Bewegung und zur Maximierung des Durchsatzes, im Gegensatz zum reinen Fahren mit der niedrigsten Geschwindigkeit. Auch wenn FTS nach wie vor wichtig und richtig sind, ist die Verbreitung von AMR durchaus gerechtfertigt. Allerdings geht sie mit zusätzlichen Herausforderungen einher. Melde dich bei uns, um dir eine umfassende Meinung zu bilden und herauszufinden, ob sich der Einsatz auch in deinem Unternehmen lohnt. Der oben gezeigte AMR wurde ebenfalls von Grund auf selbst entwickelt, und zwar hier bei Motius. Wenn du sich für AMRs interessierst, freuen wir uns darauf, euch in eurem Entwicklungsstadium zu treffen und gemeinsam etwas Großartiges (und Sicheres) zu entwickeln.









